Um sistema servo típico tem três componentes principais: um servomotor com um ou mais dispositivos de feedback, como um sensor de efeito Hall, um encoder ou resolver, um drive amplificador que alimenta e controla o motor, e o cabeamento necessário entre o motor e o drive. O sistema como um todo funciona por meio de uma série de malhas de controle integradas.
À medida que o drive alimenta o motor, os dispositivos de feedback monitoram a velocidade e/ou posição do rotor. Esses sinais são enviados aos circuitos de controle do drive, que ajustam continuamente a corrente e a tensão fornecidas ao motor, a fim de corrigir instantaneamente quaisquer erros e garantir que os movimentos programados sejam executados sem falhas.
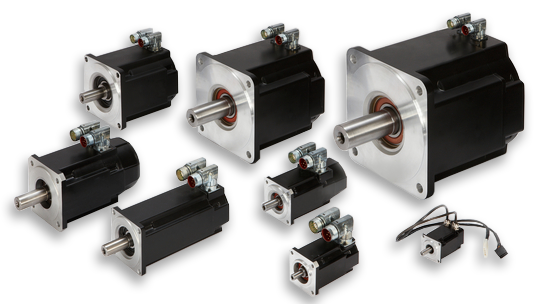
Existem muitos tipos de servomotores, mas todos compartilham a capacidade de integração com dispositivos de feedback e respondem com precisão aos comandos de posicionamento, velocidade e direção do drive. Esse movimento variável e preciso é essencial para usar em uma ampla gama de aplicações industriais: robótica, aeroespacial, imagens médicas, automação laboratorial, produção de alimentos e bebidas, conformação de metais e muito mais.