






blog |
伺服系统中的带宽、增益和相位裕量:什么是相位裕量?
|
| 全文阅读时间2分钟
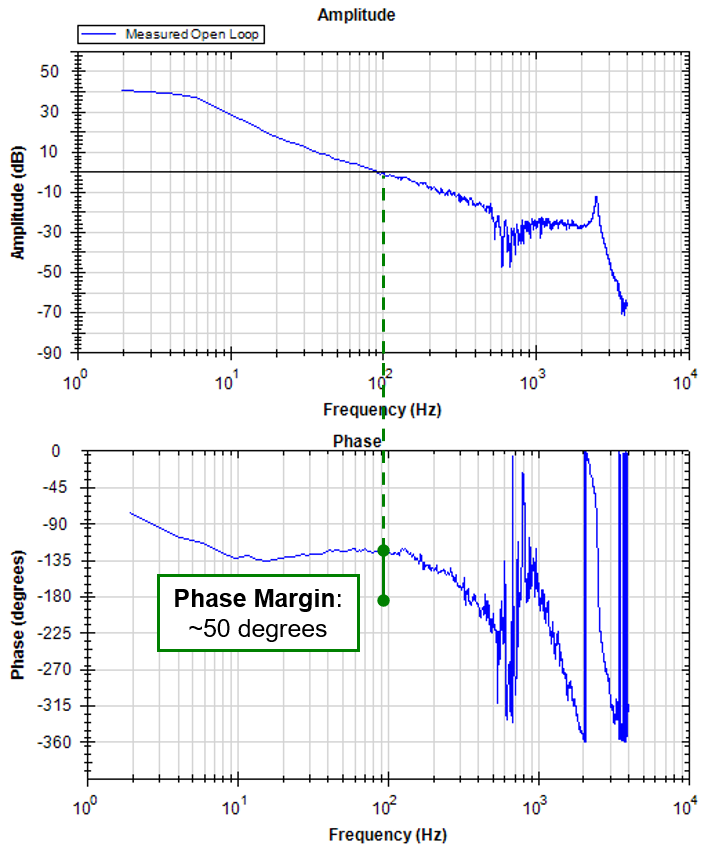 相位裕量是频域的测量值,在波特图中,计算振幅值越过 0dB(增益交叉频率)时 -180° 以上的相位滞后量。差异越大,稳定性越好。相位裕量是指系统变得不稳定之前可用的相位滞后量。
相位裕量是频域的测量值,在波特图中,计算振幅值越过 0dB(增益交叉频率)时 -180° 以上的相位滞后量。差异越大,稳定性越好。相位裕量是指系统变得不稳定之前可用的相位滞后量。
相位裕量越高,就越能灵活地利用各种滤波技术,同时对系统进行调谐以优化整体性能。
振幅增益裕量和相位裕量都允许伺服技术人员决定滤波和其他环增益,来调节并优化伺服系统性能。








