





稳定的伺服系统对于实现最优机器性能、耐久性、安全性和一致的机器性能至关重要,可改善机器的整体运行。伺服系统运行的稳定程度不同,在稳定和不稳定之间有着微妙的界限。机械系统随时间的推移而发生的变化或机器负载的不同会使系统从稳定运行状态变为不稳定运行状态。本文介绍了决定伺服系统稳定性的四个关键参数值。
波特图是确定伺服系统稳定性的重要分析工具,在频域内提供机构的可视化描述,并识别系统收到的一系列信号的相位和振幅响应。在该图中,可计算带宽、振幅增益裕量、相位裕量和刚度四个参数值,从而合理地确定伺服稳定性。相位和增益裕量具体地决定机构还有多久会变得不稳定。
伺服系统的带宽确定伺服系统遵循给定命令并保持指定性能水平的频率。它表明了系统对运动命令做出响应,然后稳定(处理)下来的速度。在频域中,波特图直接测量闭环增益增益-3dB对应的频率,即系统带宽。(见图1)
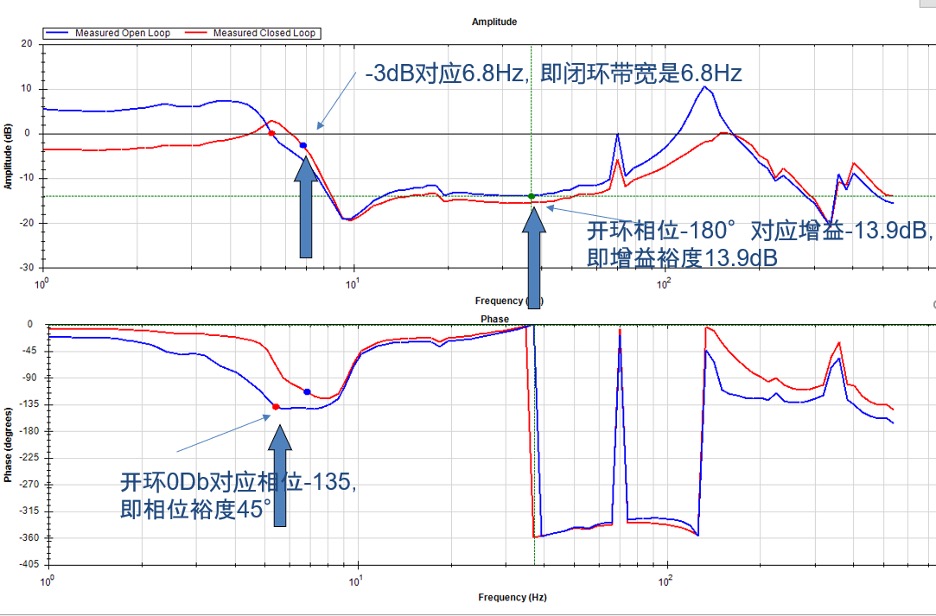
图 1 - 带宽测量
振幅图测量输入频率增加时减少的响应振幅。振幅增益裕量是相位图首次越过 -180° 时低于 0 dB 的值。该值低于 0 dB 越多,系统越稳定。在图1中,系统的增益裕度是13.9dB,而在如下所示的图 2 中,系统的增益裕度为9.2 dB。
相位图测量输入频率对应的相位响应(以度为单位)。在特定频率下,对输入命令的响应 相位是-180 度,则反相。要确定相位裕量,可计算增益值越过 0dB 时的相位值与 -180° 的差值。该值越大,系统会越稳定。在图1中,相位裕量为 45 度,下图2中,相位裕度是48度。一般稳定伺服系统的典型值是8 dB 的增益裕量和 45 度的相位裕量。
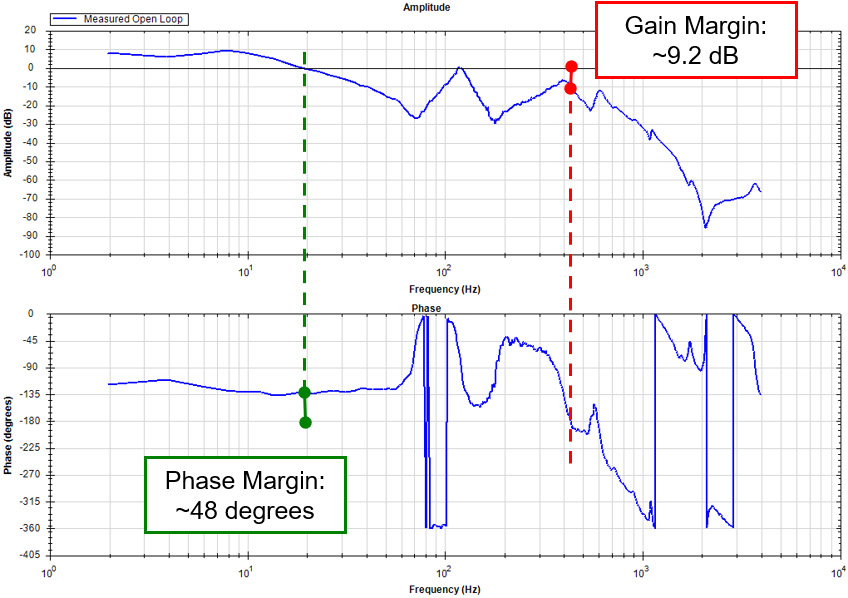
图 2 - 相位和增益裕量
稳定系统的最后一个测量值是机械系统的刚度。刚度对于获取尽可能最高的带宽至关重要 - 系统刚度越高,可实现的带宽越高。波特图提供了系统刚度的快照。首个共振点的频率越低,系统刚度越低。首个并联谐振频率由下式表示:
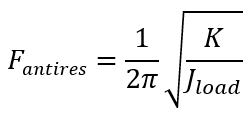
假设负载固定 (Jload),随着刚度 (K) 减小,首个共振频率也减小。这就可能减少带宽。带宽减少可能影响机器的最优性能,或者充其量限制生产力。
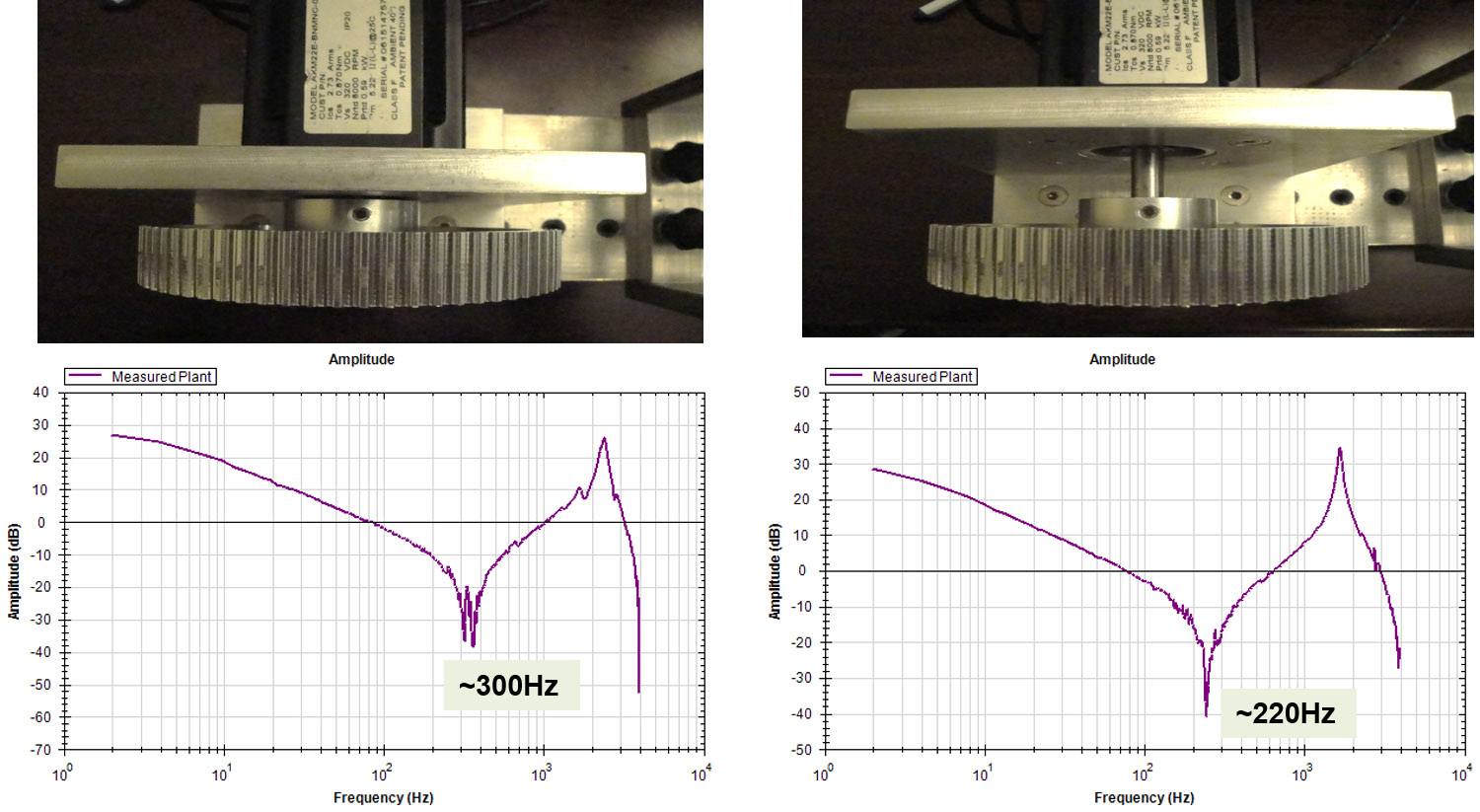
下图显示轴上皮带轮位置的变化对机械刚度的影响,以及提高或降低首个并联谐振频率。
伺服稳定性的这四个关键要素为机器性能优化提供了蓝图。波特图提供的相位和增益裕量测量值以及带宽、刚度和整体机械共振有助于伺服技术人员使用各种滤波技术来调节系统。精确调节且稳定的伺服系统是机器性能、耐久性和安全性的关键。