
协作机器人和关节模组 >
协作机器人旨在像人类同事一样进行学习和适应,这就需要受控的安全运动控制。 借助科尔摩根伺服电机,协作机器人和力限制机器人为包装、工厂自动化、食品和饮料加工、生命科学、医疗自动化等行业带来了新的能力和效率。
外科手术自动化 >
基于科尔摩根电机和控制设备的机器人系统能够帮助外科医生以更高的成功率完成专业的微创手术,包括改善视力和挽救生命。
适用于人形机器人的电机 >
适用于人形机器人的电机:利用专为机器人设计的运动控制系统,解决性能、尺寸、重量、功耗和成本等问题。
外骨骼 >
无论是为老年人提供更强的行动自由和行动能力,还是在工业应用中提升人体机能,在这些前景的鼓舞下,人们对于外骨骼的需求正在显著上升。但如何有效、安全地模仿人类运动,是一项不折不扣的挑战。设计人员必须平衡转矩和速度的需求,同时还要保持设计紧凑、轻便、舒适,并且能够在达到性能峰值时维持低温。这正是战略性的电机设计和选择大显身手之处。
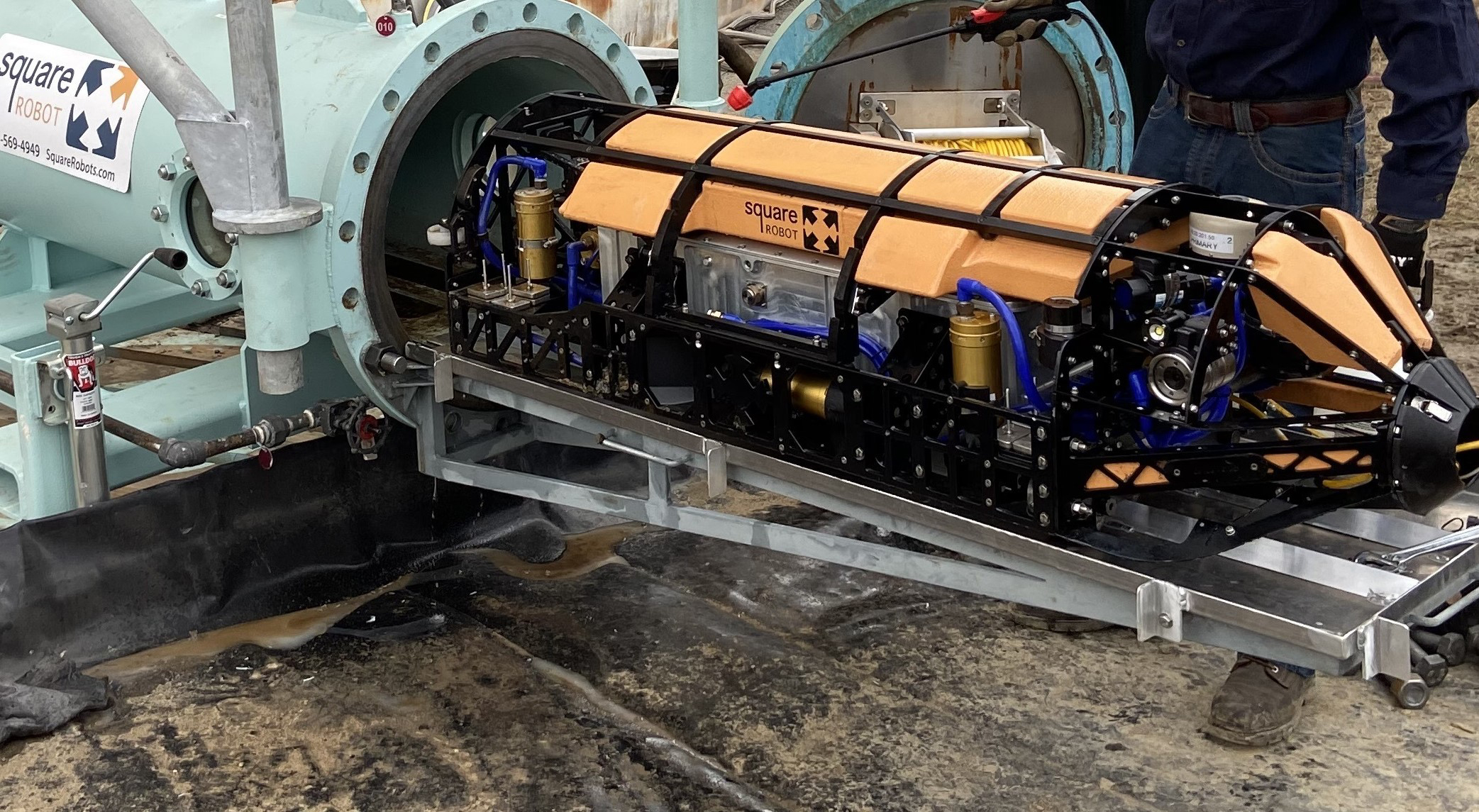
户外机器人 >
适用于户外、地下和水下机器人的先进运动控制系统 - 科尔摩根探索其优化的运动控制系统如何提高精度和效率,使移动机器人能运行更持久
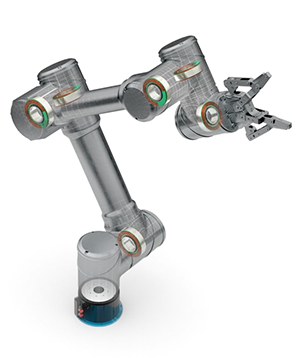
工业多关节机器人 >
建造更轻、更小的工业机器人,并达到更高的速度和精度。我们可以为多种尺寸和方案的产品提供更高的功率密度。
SCARA机器人 >
从二十世纪八十年代早期开始,选择顺应性装配机器手臂(SCARA)技术就给工厂自动化、部件组装、生命科学以及其它应用领域的拾放过程带来了根本性的变化。外骨骼规模化:加速从研发到全速生产的过渡
外骨骼市场仍处于早期阶段 — 但它发展迅速,充满机遇。
这对于原始设备制造商来说是一把双刃剑,厂商必须找出最具影响力的应用,并攻克全速生产的难题。
了解更多相关信息

优化用于关节运动的机械臂执行器 >
了解执行器架构、热管理和传动设计会如何影响机械臂的性能与可靠性。
防爆技术为重载 AGV 构筑安全屏障 >
AKME 伺服电机系列取得了 ATEX 认证,支持在化工、涂装、抛光及特种设施等危险环境内重载 AGV 的研发应用需求。
通过紧凑型机器人执行器实现高精度和更高负载能力 >
HEBI Robotics 使用科尔摩根 TBM2G 无框伺服电机提升了工业检测和维护应用中紧凑型执行器的扭矩和精度。
科尔摩根运动控制系统如何助力电缆机器人实现三倍产能 >
了解 Rbot9 为何选用 AKM2G 伺服电机和 AKD 伺服驱动器,以大幅提高其大型悬挂式电缆机器人的有效负载能力、速度和垂直负载安全性。外骨骼规模化:加速从研发到全速生产的过渡 >
外骨骼市场仍处于早期阶段 — 但它发展迅速,充满机遇。 这对于原始设备制造商来说是一把双刃剑,厂商必须找出最具影响力的应用,并攻克全速生产的难题。
推进外骨骼技术发展:运动控制和电机设计的关键考虑因素 >
提到外骨骼应用时,运动控制设计和电机选择是设计过程中的成败关键。 和我们一起探索关键的考虑因素和见解,迈向成功之路。
更舒适、行动更安全的外骨骼设计 >
随着外骨骼市场的不断发展,原始设备制造商如何才能实现更舒适、灵活、可靠的设计? 请阅读博客以了解更多信息。
加快新一代假肢和外骨骼的开发 >
Humotech 创立于 2015 年,它的诞生源自一个简单的问题:不同于传统的 原型机设计与制造流程,如果工程师可以通过编程让机器人在用户行走时实 时模拟假肢、矫形器、外骨骼和其他可穿戴机器装置,从而对它们进行评 估,那会怎么样?