从深海基础设施的维护修理到废水池的检查。 从有害的油气田到脏乱危险的建筑工地。 从研究样本采集到灾区搜救。 在上述应用和很多其他应用场合,户外工作机器人能够执行一些对人类来说过于肮脏和危险的任务。 在劳动力持续短缺的情况下,机器人也非常适合从事人类无法胜任的工作。
户外工作机器人面临着一大核心挑战,即必须在非结构化的环境中工作,执行复杂任务,且经常需要昼夜不停地持续运转。 为了完成这类高难度的专业化工作,制造商们正着手设计适用于各种特定用途的机器人。
这些机器人可能体积庞大且功能强大,例如可帮助建造桥梁和楼房的建筑机器人。 它们可能需要在具有挑战性的偏远环境下长距离可靠运行;例如:大型自动采矿卡车的自动转向和控制系统。 它们可能小巧且隐蔽,例如侦察机器人。 它们可能需要部署在极端地点,例如海底或地外表面。 它们可能会从事特别灵巧的工作,例如采摘水果。
上述专业应用需要复杂的运动系统、自动化软件和维护程序,从成本和用户培训的角度来看,这些因素都提高了进入门槛。 因此,人们对于使用机器人即服务(又称为 RaaS)越来越感兴趣。
例如,施工人员可以租用机器人来完成桥梁建设多个阶段的工作。机器人可以昼夜不停地运行,以更快的速度和更低的风险完成工作,同时使人们能腾出时间来完成其他重要任务。 一旦完成作业,便可将机器人退还给 RaaS 提供商,以便其他工作场所租赁。 租赁机器人的使用率可能会特别高,因此其耐用性和可靠性变得至关重要。
户外工作机器人运动控制的种种挑战和要求
机器人与运动控制息息相关,而户外工作机器人的运动控制要求尤为严格。 由于必须在各种不可预知的地点工作,因此可靠性、效率和高效集成是机器人性能的关键所在。 如果机器人在作业过程中出现运动控制部件故障或电池电量耗尽的情况,处理起来就会既费钱又费时,甚至非常危险。
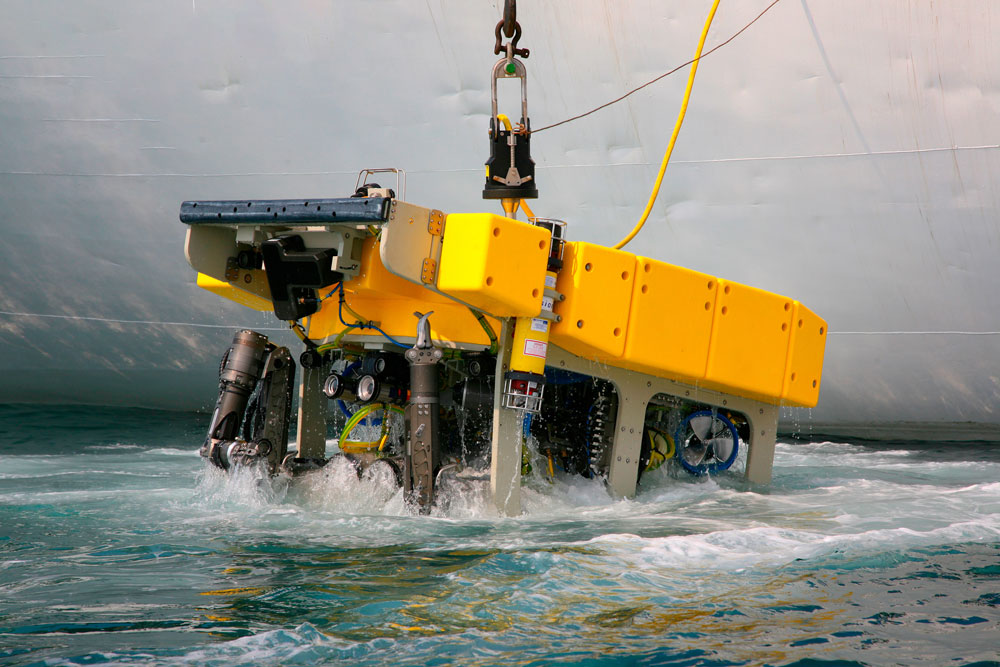
例如,水下机器人在高压环境或废水存储罐中失去动力。 探矿机器人在对人类不安全的深层地下区域发生故障。 或者,太空探索飞行器在 1 亿英里之外,其主要功能失效。 在这种情况下,昂贵的机器人毫无用武之地,除非它能被回收,但回收工作可能会极其困难、危险或无法实现。
更严重的是,机器人故障可能会导致生产中断,而在建筑、石油天然气、采矿等行业,意外停机的成本可能是天文数字。
运行可靠、性能高效的运动控制系统有助于最大限度地降低故障风险,提高工作效率,并最大程度地延长机器人的工作时间。 适用于此类机器人的电机应具备以下特点:
- 与机器人设计中的其他元素(如谐波减速机或其他传动部件)适当集成。
- 尺寸合适,可满足应用的持续和峰值转矩要求,同时在理想速度范围内运行。
- 尺寸尽可能小,同时满足应用性能要求。
- 温升受到限制,可防止过热,并在遇到极端的环境温度时仍能充分发挥性能。
- 坚固可靠,能够承受户外工作机器人可能遇到的各种状况。
- 专为满足各类特殊应用要求而设计制造,例如用于水下机器人的潜水电机、用于肮脏和露天应用场合的防水电机,或经相关认证且适用于危险场所的防爆电机。
- 在机器人计划的整个生命周期内,可在全球范围实现稳定的产品交付和支持服务。
科尔摩根可为您提供高质服务
数十年来,科尔摩根在设计和交付业内高性能的电机方面积累了丰富经验,并针对机器臂关节和其他机器人应用进行了产品优化,我们深知如何满足户外工作机器人的苛刻要求,绝不允许出现任何故障。
其中最关键的几大特性包括:高极数、旨在最小化铁芯损耗的绕组设计,以及最大限度减少静摩擦和粘滞阻尼的层压材料,所有这些特性使得电机能够更高效地延长运行时间,并降低发热风险,从而提高系统可靠性。
专为机器人关节设计的无框电机具有较大的通孔和较高的内径与外径比,可减少关节的总重量、长度和惯性,同时轻松容纳电源/反馈电缆和其他组件。 许多无框电机可与现有的谐波(应变波)减速机设计搭配使用,实现更经济、更可靠的机器人设计。
此外,科尔摩根还可经济高效地对电机绕组进行改装,力求满足各种应用对精确速度、连续转矩和峰值转矩的需求。 无论是在重量、空间还是节能封装方面,科尔摩根电机都能满足各种应用的精确性能要求,并可避免因电机尺寸过大或过小而降低系统效率和可靠性的风险。
科尔摩根还提供专为深海环境、危险场所、露天环境、冲洗环境、高海拔、地外及其他极端环境而设计的电机。 面对如此广泛的高度专业化应用,原始设备制造商 (OEM) 通常会要求开展快速原型设计,并在将新型户外工作机器人设计推向市场的过程中下少量的初始订单。 虽然大多数电机提供商都对这类要求不屑一顾,但科尔摩根却非常欢迎这些专业项目。
科尔摩根拥有协作文化、广泛的产品选择、优秀的工程能力和本地设计团队,可帮助您缩短设计周期,将性能更强、更可靠、运行时间更长的户外工作机器人推向市场。 凭借全球制造和支持设施、始终如一的质量承诺以及数十年久经考验的机器人专业技术,科尔摩根可帮助确保您的户外工作机器人取得长期成功。
了解更多信息
参与科尔摩根在线培训课程“通过电机设计和选择提高机器人效率”,了解我们如何解决机器人电机设计中棘手的难题。 阅读我们的 TBM2G 无框力矩电机手册,了解专为机器人设计的电机有何优势。 然后,请联系我们,以针对您的独特项目需求开展工程师之间的专业讨论。