权衡 1:转矩密度 VS 尺寸
在计算机器人关节的转矩要求时,您可能会遇到第一个需要权衡的条件 :如何在不增加机器人电机尺寸的情况下增加转矩?
在用于机器人关节的无框电机中,转矩随电机长度的增加或直径的平方增加而增加。 换而言之,直径翻倍,转矩将增加四倍,即 D2L 规则。 为了获得移动和承受大负载所需的转矩,最常用的方法是使用直径较大的机器人电机,而不是较长的电机,较长的电机会增加关节尺寸,难以集成到设计中。
但电机直径过大也会造成一定限制。 这需要速度和转矩额定值与谐波减速机配合使用,谐波减速机又称应变波减速机,通常用于保持机器人关节紧凑和消除齿隙。 但这些减速机传动系统只是在现有设计的有限范围内发挥作用。 标准电机是否能够在尺寸、重量和性能方面都经过优化的机器人关节上工作? 开发周期更长、成本更高,是否只会导致性能上的妥协?
权衡 2:速度 VS 转矩
谐波减速机系统除了结构紧凑、齿隙小外,其固有的传动比也相对较高,减速比通常在 30:1 到 320:1 不等。 谐波减速机系统的高传动比有利于高惯性负载的平稳加速/减速,和精确定位,但牺牲了速度。
工业流程的速度是一个明显的优势,所以机器人工程师致力于提高移动负载的精确性和快速性。 在配有谐波减速机的机器人关节中,这意味着需使用能够提供高输入速度(大约 4,000 rpm 或更高)的电机。 问题在于,大多数无框电机在接近额定转速范围的上限时,会迅速损失转矩。
有时,在应用所需要的速度范围内要求维持一定的转矩,此时,性能与尺寸就成为了需要权衡的内容。 在中低转速范围内运行时,为维持较高的转矩,您是否会选择较大型号的电机? 如果选择了较大型号的电机,您是否接受较大的关节尺寸设计? 您是否需要定制设计的电机或减速机? 需要多少次设计迭代,才能实现平稳的速度和一致的转矩性能?
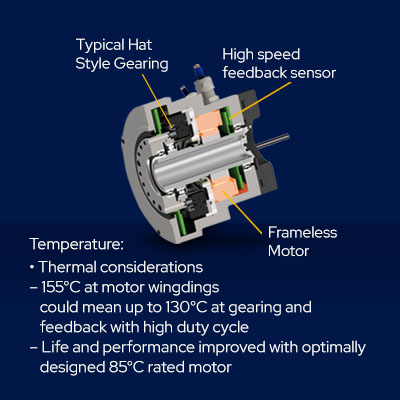
权衡 3:温度 VS 性能
正如我们所见,机器人电机需要足够的转矩和速度。 综合来看,您可以将这些因素考虑为定义电机的整体运动控制性能。 而这种性能取决于电机的电磁效率。 电机会通过绕组散热的形式损失一部分电磁能。 在给定电流下,高效率电机性能更强、工作温度更低,低效率电机则相反。
高转矩和高速度要求电机消耗更高的电流,从而导致温度升高。 然而,要在封闭的机器人关节中安装电机,还需要考虑其他因素。 大多数机器人电机的最高额定绕组温度为 125ºC 到 155ºC(环境温度 + 温升)。 在协作机器人应用中,这样的高温可能会对人体造成伤害,因此通常会对这类电机进行降额。
除了安全问题之外,还有另一个问题不为人熟知。 绕组温度远低于 125ºC,但仍然相对较高,会对减速机和其他部件产生一定的危害。 当线圈温度上升至 85ºC 以上时,润滑脂润滑性能会变差,导致减速机提前发生磨损并可能无法维持位置公差。 高温还可能导致电子元件(如编码器和其他反馈设备)失灵甚至烧毁。 每个部件都是相互联系的,一个部件因高温而失灵,机器人也会随之故障。
那么问题就变成了,您是否会降低电机功率并减慢客户的整个操作速度? 或是希望您的客户持续承受更换故障关节的费用和停机损失?
在很多方面,这都是一大权衡点。 可以通过过度指定电机性能或进行降额来避免发生高温损坏。 然而,尺寸、转矩或速度的牺牲真的在所难免吗? 有没有更好的方式?
对妥协说不
我们一直在描绘机器人电机市场的现状。 但现在,未来以来。
经过多年的研发,科尔摩根专为机器人市场打造了新一代无框伺服电机,旨在消除所有权衡取舍。 TBM2G 系列隆重推出
- TBM2G 电机采用标准尺寸,优化后可与常用谐波减速机配对,无需昂贵的定制成本,同时尽量对整体关节尺寸进行优化。
- TBM2G 电机的电磁封装经过优化,长度更短、重量更轻,可以满足 3 ~ 15 公斤级协作机器人的速度和转矩要求。
- TBM2G 电机轴向长度短、外径小且通孔尺寸大,简化了下一代机器人的复杂设计。
- 先进的材料和创新的绕组工艺可以在广泛的速度和负载要求下,提供一致的性能。
- 可选集成霍尔传感器,能够提供换相反馈而不增加电机总长度。
- 多标准的热敏传感器选项,能够与机器人市场上最流行的驱动器协同工作。
- TBM2G 电机经过专门设计,可在线圈温度不超过 85ºC 的情况下,提供卓越的性能,确保润滑脂、电子元件和其他机器人关节部件达到最大寿命。
消除更多妥协选项
从理论上来说,解决我们的三个权衡点仅需要您的一次让步:为定制电机或减速机系统设计的开发、原型设计和生产付费。 TBM2G 系列可以让您无需做任何让步。
科尔摩根拥有高度自动化的制造工艺,能够为您生产所需要的高质量电机。 助力您自信开拓市场。 正如我们所说,TBM2G 电机完全是“为机器人量身打造”。
想要了解更多信息? 欢迎联系我们进一步深入交流。 咨询运动控制专家,了解 TBM2G 系列的所有信息,该系列专为高功能性机器人设计,可帮助您构建更优秀的业务。