





_5.jpg) 伺服电机的工作原理是什么? 伺服电机是一种机电设备,它可以根据所供应的电流和电压生成转矩和速度。 伺服电机是闭环系统的组成部分,伺服控制器接收反馈装置形成闭环,发出用于控制转矩和速度的命令控制电机运行。 反馈装置向伺服控制器提供电流、速度或位置等信息,而伺服控制器则根据命令参数调整电机动作。
伺服电机的工作原理是什么? 伺服电机是一种机电设备,它可以根据所供应的电流和电压生成转矩和速度。 伺服电机是闭环系统的组成部分,伺服控制器接收反馈装置形成闭环,发出用于控制转矩和速度的命令控制电机运行。 反馈装置向伺服控制器提供电流、速度或位置等信息,而伺服控制器则根据命令参数调整电机动作。
伺服电机有各种类型、形状和尺寸。 伺服 (servo) 一词最早是由 Joseph Facort 在 1859 年提出的,他实现了一个协助蒸汽船控制船舵的反馈机制。 伺服机构由三个主要元件组成,即电机、反馈装置和控制电子装置,伺服电机就是伺服机构的一个组成部分。 电机可以是任何尺寸的交流电机或直流电机、有刷电机或无刷电机、旋转电机或直线电机。 反馈装置可以是电位计、霍尔器件、转速计、旋转变压器、编码器、线性传感器或任何其他适当的传感器。 伺服系统的最后一个组成部分就是控制电子装置,用于给电机供电,以及比较反馈数据和命令参考,以验证伺服电机是否按照命令运行。 伺服电机有许多类型的应用,从简单的直流电机(用于模型飞机等兴趣应用)到精密的无刷电机(由用于多轴加工中心的复杂运动控制器驱动)。 车辆巡航控制系统就是一个常见的伺服机构,由发动机(电机)、速度传感器(反馈)和电子设备组成,用于比较车辆速度和设定速度。 如果车辆减速,传感器就会将该数据反馈给电子设备,然后电子设备就会增加进入发动机的气量,以便将速度提高到所需的设定点,这是一个简单的闭环系统。
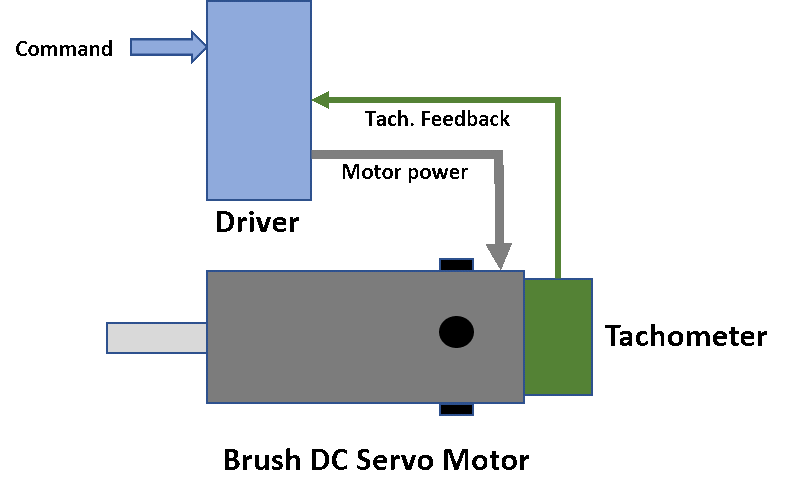 简单的工业伺服电机由永磁直流电机和内置转速计组成,转速计用于提供与速度成正比的输出电压。 驱动电子设备根据转速计反馈回来的电压向电机提供所需的电压和电流。 在这个例子中,命令速度(表示为命令参考电压)在驱动器中设置,然后驱动器中的电路会比较转速计反馈电压,并判断是否达到了所需速度,我们称之为速度闭环。 速度闭环持续监测命令速度和转速计反馈,同时驱动器会调整供应给电机的电源,以保持所需的命令速度。
简单的工业伺服电机由永磁直流电机和内置转速计组成,转速计用于提供与速度成正比的输出电压。 驱动电子设备根据转速计反馈回来的电压向电机提供所需的电压和电流。 在这个例子中,命令速度(表示为命令参考电压)在驱动器中设置,然后驱动器中的电路会比较转速计反馈电压,并判断是否达到了所需速度,我们称之为速度闭环。 速度闭环持续监测命令速度和转速计反馈,同时驱动器会调整供应给电机的电源,以保持所需的命令速度。
在更复杂的伺服系统中,为达到卓越性能,对多个嵌入式环路进行调优,以提供精确的运动控制。 系统由电流环路、速度环路和位置环路组成,这些环路均采用了精密的反馈元件。 每个环路向后续环路发送信号,并监测适当的反馈元件,从而进行实时更正,以匹配命令参数。
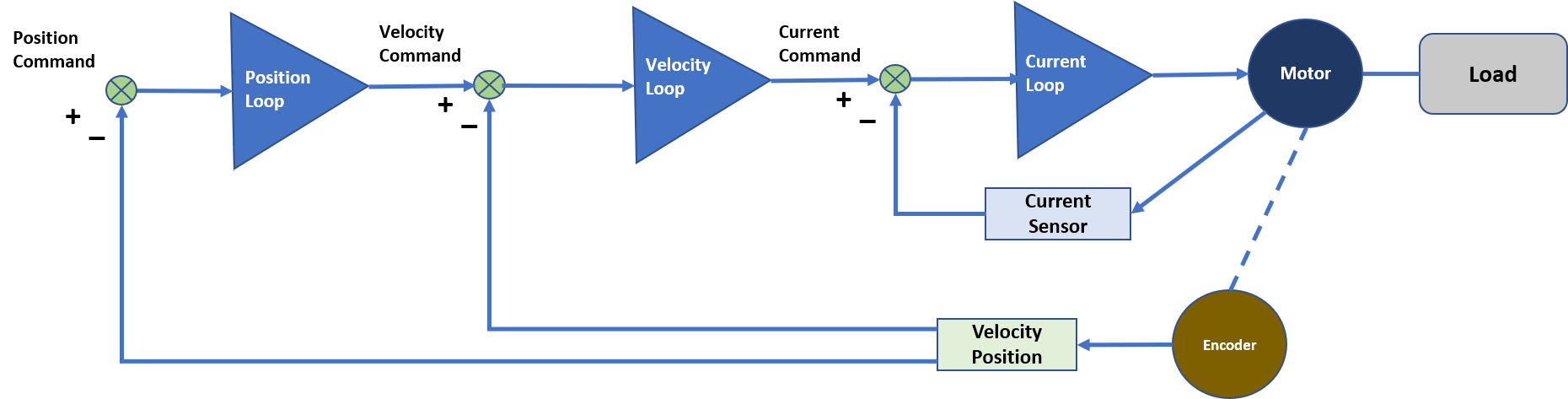
电流或转矩环路为基本环路。 电流与旋转电机中的转矩(或直线电机中的力)成正比,从而提供加速度或推力。 电流传感器用于提供流经电机的电流反馈信息。 传感器向控制电子装置回送一个信号,通常是与电机电流成正比的模拟或数字信号。 该信号应从命令信号中除去。 当伺服电机的电流达到命令电流值时,环路将得到满足,直至电流降至低于命令电流。 然后,环路将增加电流直至达到命令电流值,并以亚秒级的更新速率继续循环。
速度环路以同样的方式运行,且电压与速度成正比。 当速度降至低于命令速度时,速度环路向电流环路发送增加电流的命令(从而增加电压)。
位置环路接受 PLC 或运动控制器的命令,然后 PLC 或运动控制器提供反馈至速度环路的速度命令,而速度环路又发出所需电流的命令,使电机以加速、保持原速或减速的方式移动至命令位置。 这三个环路以经过优化的同步方式运行,以平稳精确地控制伺服机构。








