在基本形式上,伺服系统包含一个执行器(肌肉)、一个控制器(大脑)和一个反馈元件(感官)。 在自动化领域,虽然肌肉可以是各种机械结构,但最具代表性的是伺服电机。 同样,大脑也可以由各种元件表示,但最常见的是运动控制器或伺服驱动器。 传感通过电流传感器或编码器、旋变以及视觉系统,为大脑提供反馈信息。
当控制器向执行器发送信号令其移动到特定位置时,执行器开始移动,反馈装置向控制器传回信号告知执行器移动的位置和速度。 控制器随后查看反馈信息,并确定电机是否到达指令位置。 如果没有,则控制器将继续向执行器发送信号,令其移动,直到收到反馈装置的信号,显示电机已经到达所需位置。
 伺服系统的运行流程与人体非常相似,一个出色的多轴运动控制系统,包含几百条肌肉、多个反馈装置,以及一个可以迅速做出调整的控制系统。 例如,一位棒球运动员踏上垒板击球,其大脑会分析目前的状况、垒上的球员数量、当前出局人数、防守方的站位。 击球手看向三垒教练,收到击球的信号(图像从眼睛传到大脑)。 投手投球时,击球手预估投球,思考球飞过垒板的位置。 当投手将球投出,击球手的眼睛向大脑发送信息,由大脑分析球的飞行轨迹,在瞬间做出决定,将信号发送给多个肌肉,从而协调挥动球棒精准击球。 如果击球手未击中球,大脑则会分析错误,做出调整应对下一次投球。 人体像伺服系统一样,通过协调精确动作节奏进行工作。 现代工业的伺服系统有了显著的进步,包括复杂的控制器以及多种反馈设备和快速处理器,可以在一纳秒内做出数个决定,以执行所需运动控制。 通常工业伺服系统细分包括:
伺服系统的运行流程与人体非常相似,一个出色的多轴运动控制系统,包含几百条肌肉、多个反馈装置,以及一个可以迅速做出调整的控制系统。 例如,一位棒球运动员踏上垒板击球,其大脑会分析目前的状况、垒上的球员数量、当前出局人数、防守方的站位。 击球手看向三垒教练,收到击球的信号(图像从眼睛传到大脑)。 投手投球时,击球手预估投球,思考球飞过垒板的位置。 当投手将球投出,击球手的眼睛向大脑发送信息,由大脑分析球的飞行轨迹,在瞬间做出决定,将信号发送给多个肌肉,从而协调挥动球棒精准击球。 如果击球手未击中球,大脑则会分析错误,做出调整应对下一次投球。 人体像伺服系统一样,通过协调精确动作节奏进行工作。 现代工业的伺服系统有了显著的进步,包括复杂的控制器以及多种反馈设备和快速处理器,可以在一纳秒内做出数个决定,以执行所需运动控制。 通常工业伺服系统细分包括:
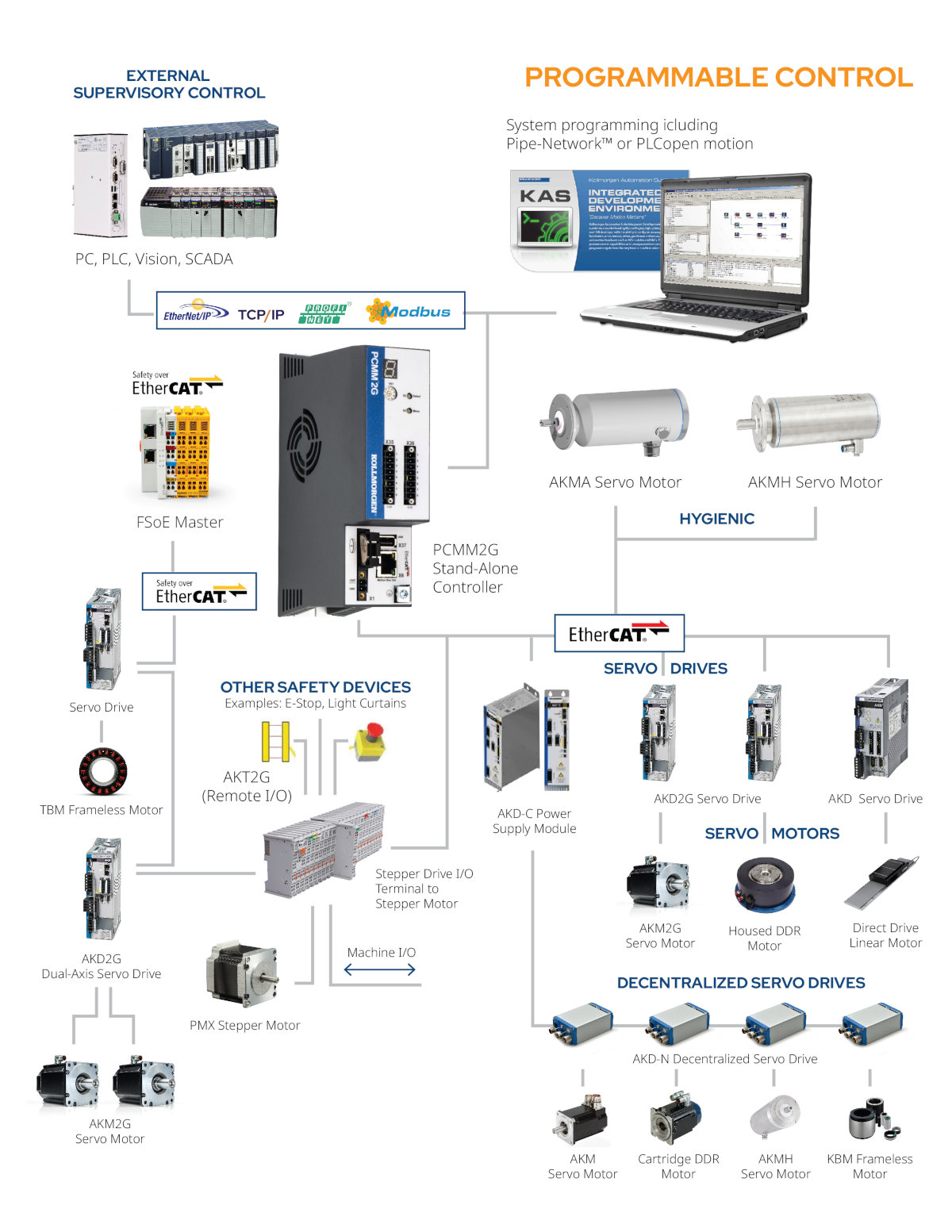
- 伺服电机——系统的肌肉,可采用多种技术,包括有刷电机或无刷电机、有框或无框电机,以及直线或旋转电机。 电机产生加速和移动负载所需的转矩。
- 伺服驱动器——这可以是系统的大脑,也可以是大脑的一部分。 简单的伺服驱动器可以控制转矩和速度,而更高级的伺服驱动器可以提供额外功能,可使用编程功能配置为定位器。 驱动器或控制器可与伺服电机相匹配,控制电机接收的电压和电流。
- 伺服控制器——系统的大脑,利用编程环境,为机械控制、输入输出提供各种选项,并与一种图形用户界面进行连接。 伺服控制器可以独立,也可以与伺服驱动器集成。
- 反馈——系统传感,通常集成到伺服电机中。 反馈元件可能包括编码器、旋变、线性反馈装置、测速仪等。 复杂控制系统可能包括更多先进的反馈形式,例如视觉系统。
- 电缆——伺服系统相互连通,因此反馈、通信和电力反馈电缆成为连接大脑、肌肉和感官的神经系统。
为伺服系统选择正确的组件,需要仔细分析系统性能要求。 所需的“肌肉”数量决定了伺服电机的规模,这反过来又对伺服驱动器的选择产生影响。 应用的精度对反馈选择也起着一定作用,特别是反馈装置的类型和分辨率。 系统中其他装置之间的协调量,以及所需的响应决定所需控制器的等级。
将所有这些结合到一起可能是一项艰巨的任务。 与像科尔摩根的运动控制专家合作,可以更轻松快捷地选择伺服系统,让应用获得卓越系统。