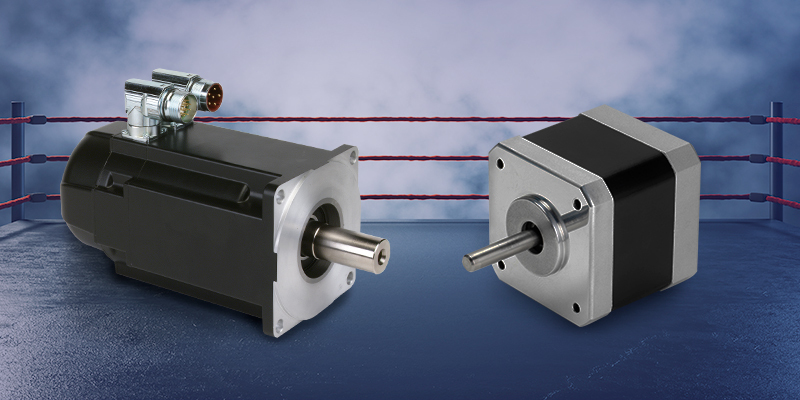
危险环境下伺服电机设计的注意事项 >
虽然伺服电机和驱动器广泛应用于各种工业应用,但当它们在极端或危险环境中运行时,我们应该考虑哪些事项? 许多情况下,电机本身运行在极端环境下,而驱动电子系统则受到保护,不受危险影响。 本博客文章将讨论伺服电机面对的性能挑战和电机在极端环境下运行时需要考虑的设计问题。

较高环境温度导致的电机降额 >
当电机在高于其额定温度的环境下运行时,如何计算电机的连续扭矩? 由于电机的额定连续扭矩 (Tc) 是在 40°C 的环境下测定的,我如何才能在环境温度为55°C的最坏情况下估算电机的连续扭矩?

AGV 性能:深入了解神经网络 >
机器学习和神经网络是现代物流行业中的两大术语,但其究竟意味着什么? 我们需要专家来解答。 《Logistics Business》杂志的编辑 Paul Hamblin 就遇到了一位。
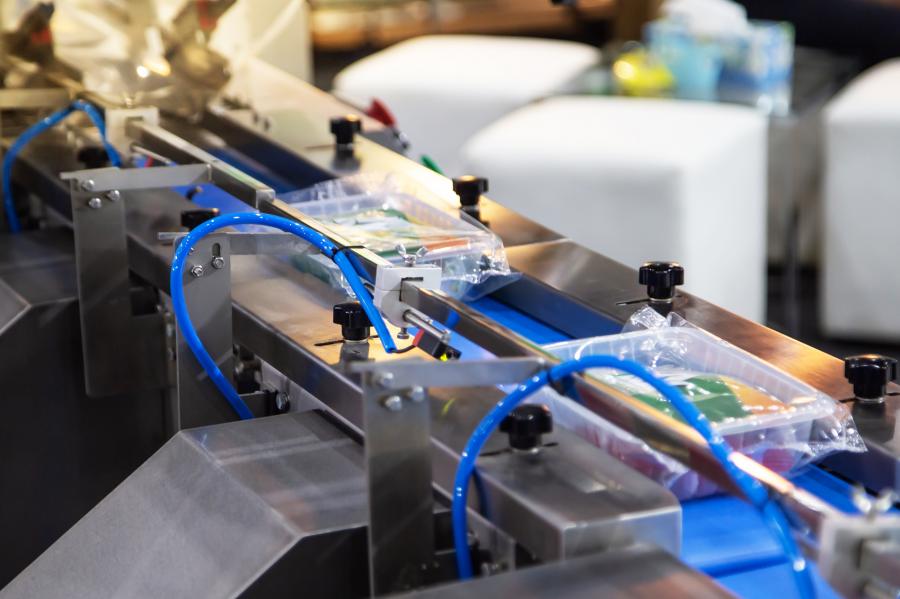
突破高速水平包装机的极限 >
在水平包装机上使用传统的单电机加齿轮箱设置,可能导致您无法意识到跟上需求所需要的灵活性和性能。随着包装消费品需求的持续激增(NielsenIQ 的数据显示,有 580 亿美元的增长机会)和消费者网上购物习惯的养成,许多制造商都在苦苦挣扎于电子商务与实体店相比空前微薄的利润和盈利能力的下滑。而为了提升利润率(和收益),制造商转而投向因渠道而异的分类(比如不同的包装、捆绑和包装尺寸),以缓解渠道冲突和增加利润。

小型化伺服是自适应大规模定制机器的关键 >
对于寻求提供个性化功能的制造商而言,要想真正实现大规模定制和单件生产,需要的不仅仅是购买最新的 3D 打印机或设备。更为重要的是,要了解整个供应链,而这涉及产品的构思、设计以及制造和物流。

如何定制伺服电机 - 标准与定制 >
标准伺服电机的定制时机和方式取决于定制的预期收益,定制解决方案中需要包括外形、安装和功能。 了解更多信息。

为何考虑在定制解决方案中使用无框电机 >
另一种定制伺服电机的方式是,使用无框电机并直接集成到机器上。阅读我们新的技术文章,了解更多信息!
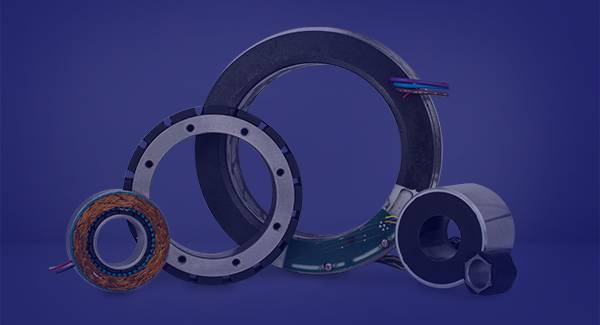
无框电机的干货知识 >
选择无框电机的原因有很多。 它们非常紧凑、简单、高效和精确。 这是您的应用需要的吗?

如何判断自己的电机是否防爆? >
防爆电机的铭牌上清楚地标明了电机适用的某种特定危险环境。铭牌将清楚地标明电机适用的危险场所分类、分区和分组。

智能技术正在改变着包装机器的性能 >
从概念设计到生产,Kollmorgen 能够帮助您实现最宏大的产品设计、最强大的生产制造能力以及最自信的产品交付。

为什么要使用防爆电机? >
电机在正常工作条件下会发热,如果转子线圈出现故障,可能产生火花。 如果环境中存在特定危险物质,那么电机外壳温度过高或未能正确遏制火花可能会引起爆炸或起火。