欢迎成为科尔摩根NDC合作伙伴 >
自动化行业在近年来实现了指数型增长,这得益于工业4.0和中国制造2025等战略计划的驱动,以及电商市场的崛起。对于AGV&移动机器人制造商来说,为了应对激烈的竞争和不断增长的市场需求,需要选择最强大的自动化技术来缩短产品研发及上市时间。成为科尔摩根NDC合作伙伴,通过更紧密的团队合作,我们可以共同创造更好的业务。NDC 解决方案是一套完整的久经市场考验的自动化套件,将其配备于您的AGV车辆上,让您的公司成为客户眼中优秀的解决方案供应商,并在市场上保持出色地位。

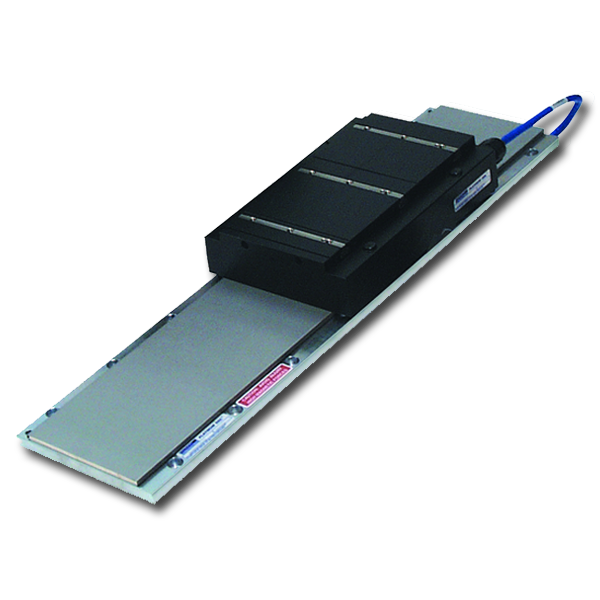
如何选择直接驱动型直线执行器 >
为特定应用选择直接驱动型直线执行器时需要考虑多个方面,如所需的速度、力、运动轨迹、可用物理外壳和环境因素。这意味着所选择的执行器解决方案必须满足负载力和速度的要求,适应可用空间,并在应用所处的环境条件下性能符合要求。

如何选择步进电机 >
选择步进电机时,必须考虑几个性能要求。我们的步进电机优化工具是确定这些需求快速、可靠的方法。

步进电机的工作原理 >
步进电机是一种简单的两相无刷同步电机,包含一个分段磁化的转子和一个由规定数量的电磁线圈组成的定子。通电后,这些线圈产生南北极,推动或拉动分段磁化转子使其旋转。
直接驱动型直线伺服电机(执行器)的工作原理是什么? >
直接驱动型直线执行器使用永磁直线伺服电机,可基于供电电流和电压生成推力和速度,并沿着被驱动轴进行直线运动。直线伺服电机是闭环系统的组成部分,根据伺服控制器利用反馈装置发出的命令提供推力和速度,以实现闭环。简而言之,直线伺服电机的性能与旋转伺服电机相同,只是直线伺服电机是以平直的方式转动。

为什么要为您的机器选择无框电机? >
就性能方面而言,无框电机或“伺服电机套件”能为机械设备的设计提供诸多可能

EasyEngineering专访|科尔摩根研发总监——Peter Bladh >
科尔摩根自动化是科尔摩根的子公司。科尔摩根自动化,致力于研发和销售与自动化解决方案有关的产品和服务,并将其应用到智能仓储及工业制造中。公司起源于瑞典的一家家族企业(NDC- Netzler & Dahlgren Co AB),于1960年成立。自1970年开始,便进行AGV解决方案的研发。
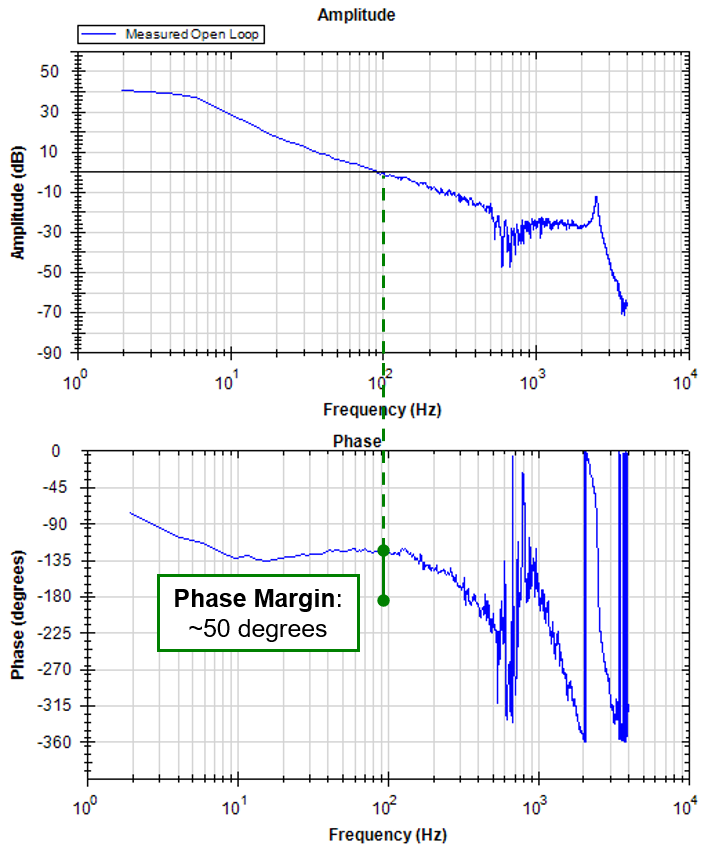
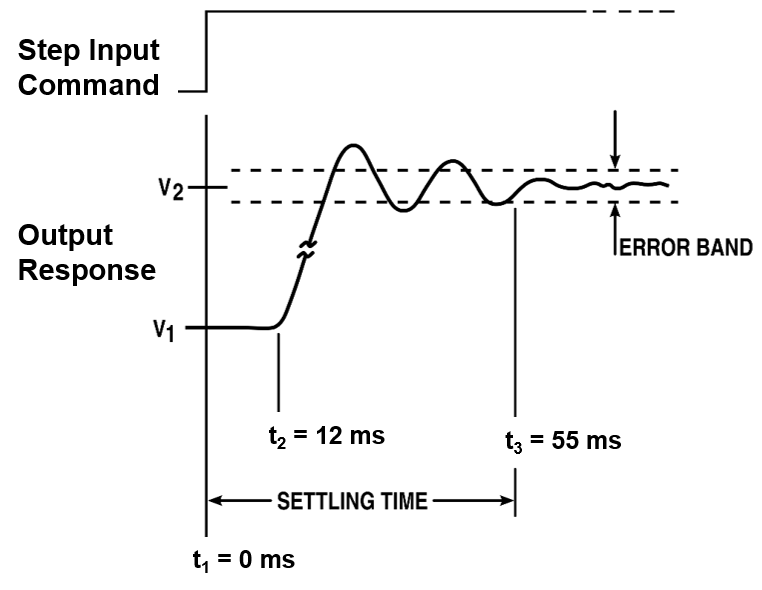
伺服系统中的带宽、增益和相位裕量:什么是相位裕量? >
相位裕量是频域的测量值,在波特图中,计算振幅值越过 0dB(增益交叉频率)时 -180° 以上的相位滞后量。

如何选择伺服驱动器 >
伺服驱动器应根据应用中使用的伺服电机进行选择。驱动机构的运转要求决定了伺服电机的电压和电流要求,这是选择伺服驱动器时需要考虑的关键因素。
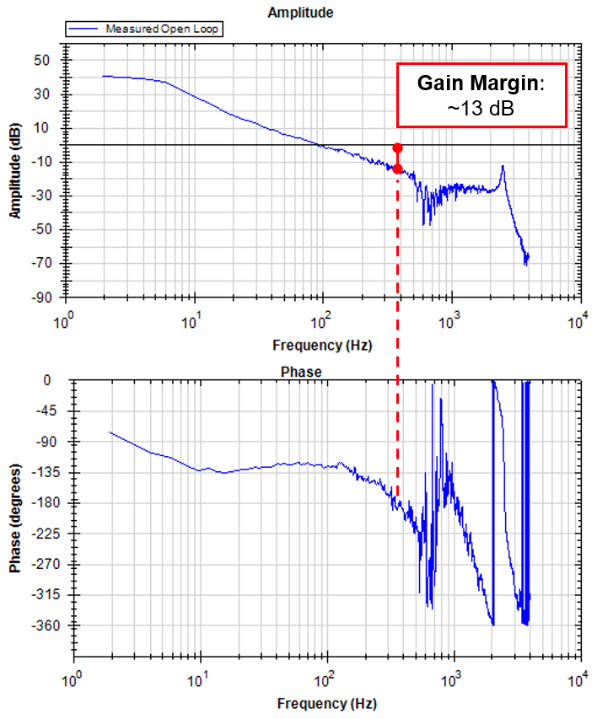
伺服系统中的带宽、增益和相位裕量:什么是振幅增益裕量? >
振幅增益裕量是频域的测量值,在波特图中,取相位达到 -180° 的最低频率点时低于 0 dB 的振幅值。

伺服驱动器的工作原理是什么? >
伺服驱动器是闭环系统中的一个电子装置,为伺服电机的运行提供电流和电压。闭环系统包括伺服驱动器、伺服电机和反馈装置,可接收模拟或数字信号指令。