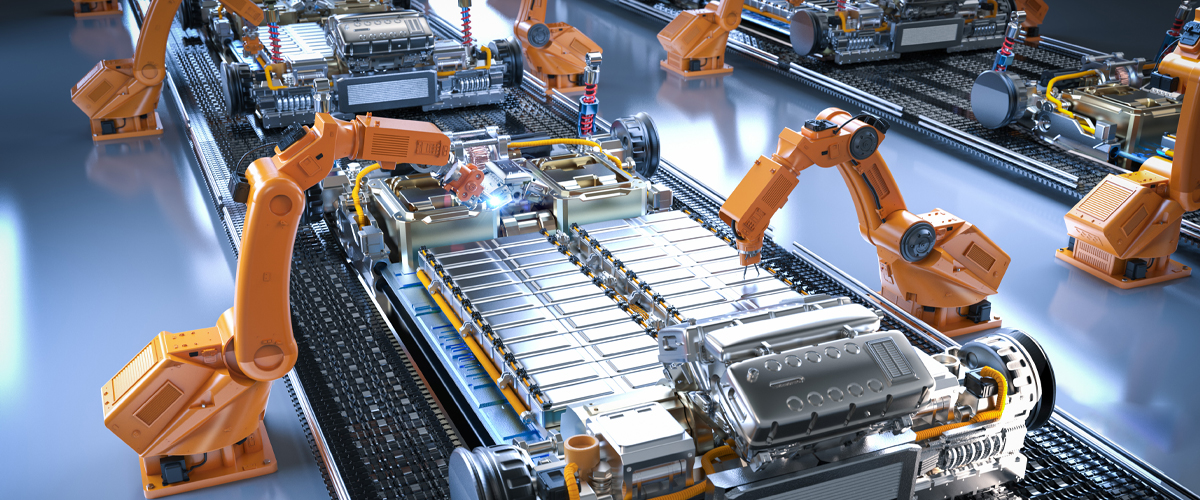
掌握现代生产单元中的多轴运动控制技术 >
运动控制系统扩大规模后,同步控制难度会随之增加。 了解现代生产单元如何在高速运行下实现高精度、高稳定性与高产能。
优化用于关节运动的机械臂执行器 >
了解执行器架构、热管理和传动设计会如何影响机械臂的性能与可靠性。

AKME 与 Goldline:危险场所应用应选用何种电机? >
适用于危险场所的全新 AKME 系列通过 ATEX 和 IECEx 认证,兼具出色的紧凑性和多功能性。 将 AKME 与 Goldline EB 进行比较。

直流电机、无刷直流电机和交流伺服电机之间的区别是什么? >
了解直流伺服电机、无刷直流伺服电机和交流伺服电机之间的区别。 为您的应用选择适当类型的伺服电机,对于实现最佳性能、效率和使用寿命至关重要。

反馈装置:了解霍尔效应传感器与旋转变压器 >
霍尔效应传感器与旋转变压器是用于伺服电机定位反馈的两种主流技术解决方案。 两种方案各有优劣。 了解二者的工作原理及如何为应用场景选择合适的反馈装置。

反馈装置:了解线性、旋转与正弦编码器 >
线性、旋转与正弦编码器可为需要绝对精度的伺服系统提供高分辨率的位置反馈。 但这些编码器并不一定是每种应用场景的合适选择。 了解编码器工作原理及如何选择合适的反馈装置。

反馈设备:设备位置、反馈类型和可用技术概览 >
反馈装置选型对实现伺服系统精度与可靠性至关重要。 了解反馈选项及关键选型标准。
设计步进系统时应避免的 5 种错误 >
步进系统能够实现高效、强大而安静的运行,但前提是您做出正确的选择。 下面介绍了在设计步进电机和驱动器时应避免的 5 种常见错误和应采取的 5 个正确做法,以便加快您开发成功机器的速度。

冗余伺服反馈:确保重要场景中的定位万无一失 >
在医疗器械和许多工业应用场景中,运动系统的故障是绝对不容发生的情况。 了解集成了冗余反馈设备的伺服电机如何轻松保障运动的整体可靠性。 了解更多

eVTOL 飞机:使用 Regal Rexnord 航空航天解决方案解决运动控制难题 >
要在竞争激烈的 eVTOL 市场中获胜,您需要为整个飞机提供优化的运动控制解决方案。了解为什么 Regal Rexnord航空航天解决方案是您理想的合作伙伴。
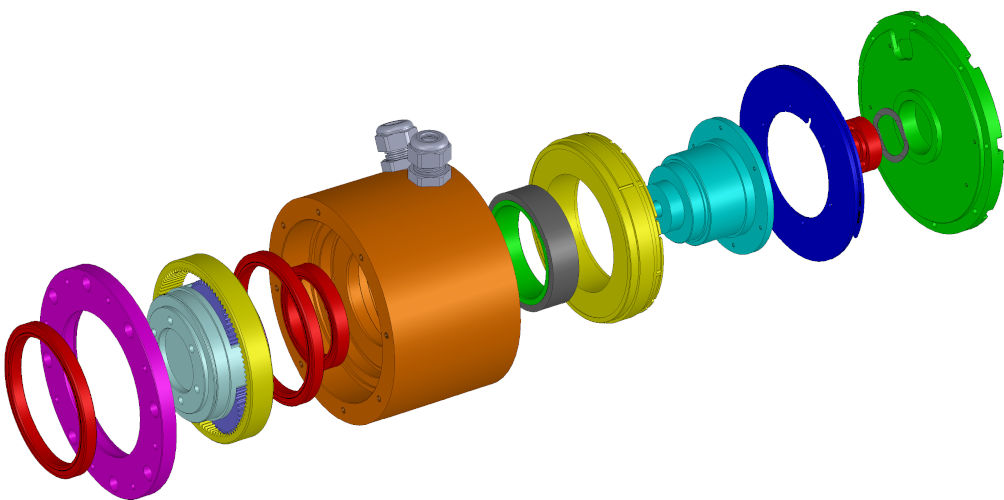
您考虑过无框电机吗? >
提到无刷直流伺服电机时,大部分工程师可能会联想到一个箱体,带有连接安装螺栓的法兰、连接电源和数据线缆的接口,以及直接与负载耦合的转子轴。